What Sets JetArm Robot Arm Apart?
The robot arm market offers a vast array of options, often equipped with an extensive range of sensors alongside cameras to enhance their intelligence. Yet, developers frequently encounter a common challenge: the inability of robot arms to transcend the constraints of 2D panels, regardless of the number of sensors integrated.
Fortunately, Hiwonder has pioneered a solution with the development of JetArm. So, what distinguishes JetArm from other robot arms available on the market?
Fortunately, Hiwonder has pioneered a solution with the development of JetArm. So, what distinguishes JetArm from other robot arms available on the market?

01
Integration of Advantages, Industry InnovationJetArm embarks on an innovative journey by prioritizing vision enhancement. Over the past few years, the Hiwonder team has explored various avenues in robot perception, transitioning from a traditional third-person-view RGB camera stand to a pioneering first-person-view camera design. While this upgrade enables the robot arm to excel in aerial exploration and grasping functions with enhanced viewing angles, its access to information remains limited through RGB imaging. As illustrated in the table below:
| Application/ Camera Type | 2D Ordinary Camera | 3D Depth Camera |
| Gesture Recognition | Analyze gestures using image processing and machine learning algorithms | Directly accessing the 3D information of the hand enhances reliability |
| Face Recognition | Recognition relies on image texture and feature points, significantly impacted by lighting conditions | Accessing the 3D shape and depth information of the human face enhances accuracy and robustness, particularly in scenarios involving lighting changes and unobstructed views |
| Robot Navigation and Perception | Gather environment-oriented 2D images and analyze non-depth information | Enhance navigation and obstacle avoidance abilities by providing comprehensive environmental perception capabilities |
| Automation Industry | Utilize for fundamental identification tasks | Applied in shape measurement, volume measurement, product quality control, and detecting missing items |
In the same application field, the information captured by 2D cameras may no longer suffice for certain specialized cases. 3D cameras offer greater adaptability, enabling not only the acquisition of RGB images but also direct access to the object's point cloud, shape, pose, and other essential data. Consequently, there exists a noticeable disparity between robotic arms equipped with different types of cameras.

Beyond mere object grasping within a confined space, JetArm accomplishes spatial grasping by assessing height and distance based on acquired depth information. Empowered by depth technology, the robot arm's functional capabilities are elevated to new heights.

However, achieving the complete action is not solely dependent on upgrading the 3D camera. The Hiwonder team believes that enhancing the kinematics computing capability of the robot arm is also crucial.
02
Enhanced Motion, Enhanced KinematicsEfficient Solution to Inverse Kinematics
In controlling the motion of the robot arm, we can define the relative position and movement of each joint of JetArm using a set of parameters. However, due to the complexity of the robot arm's 3D motion, a multitude of matrix computations arise, which can decrease the accuracy of trajectory planning and control.
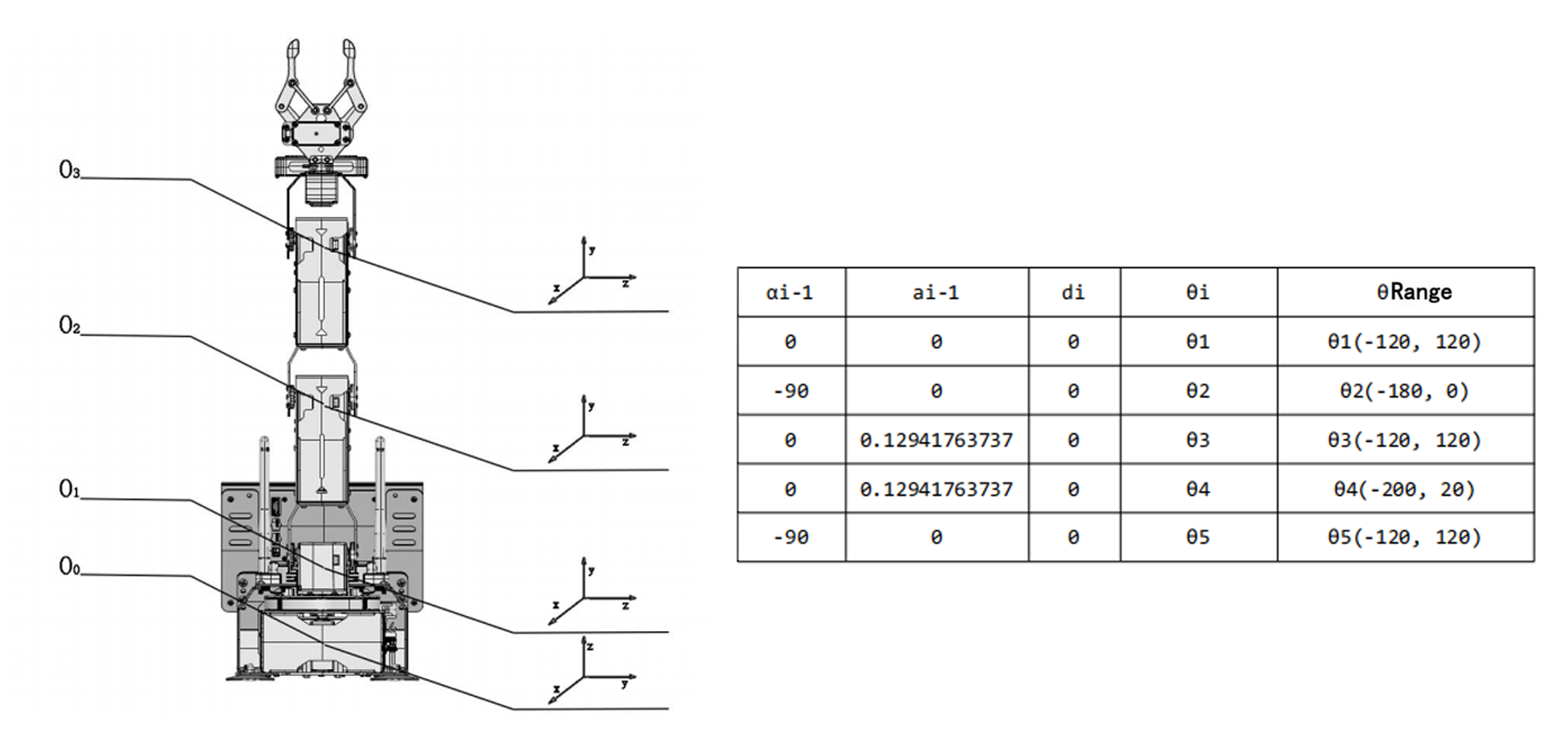
Hence, Hiwonder has devised a swift and advanced solution method. By analyzing the robot arm geometrically and simplifying the model, we utilize the quadratic equation's root formula with a single variable to calculate the required servo rotation angle.

By employing an effective inverse kinematics solution, JetArm not only achieves precise grasping within 3D space but also executes linear motion and path planning. This enables users to comprehend the interpolation principle of robot arm motion control and grasp the essence of inverse kinematics.

03
Iteration Control, Decision SeparationFreedom to Choose Your Development Solutions
In the previous operating procedure, the robot's decision-making and control tasks were solely dependent on the controller. However, when multiple sensors are enabled simultaneously and the computation of rotation angles for the robot arm servo is required, the performance of the controller may suffer, leading to less smooth operation.
To address this issue, JetArm is equipped with an STM32 robot arm controller specifically designed for servo control. This maximizes the computing performance of the controller and enhances the real-time capabilities of the robot, allowing for smoother execution of actions.

In addition to real-time capabilities, we aim for JetArm to empower users to learn across different platforms to facilitate high-quality development. At this juncture, another advantage of decision-making separation emerges: users can freely upgrade the main control board. The control and computation of JetArm are managed by separate motherboards, ensuring that the removal or upgrade of the main control board does not disrupt the operation of the robotic arm.

04
Conclusion & ReflectionsThe innovative thinking and technology behind JetArm have truly set it apart. This exploration is not the result of a brief effort but rather stems from continuous contemplation of desktop robot arm capabilities.

As a pioneer, the 3D vision robot arm represents just the beginning. Hiwonder remains committed to ongoing research, integration of other advanced technologies, and achieving true independent intelligence for desktop-level robotic arms!