

















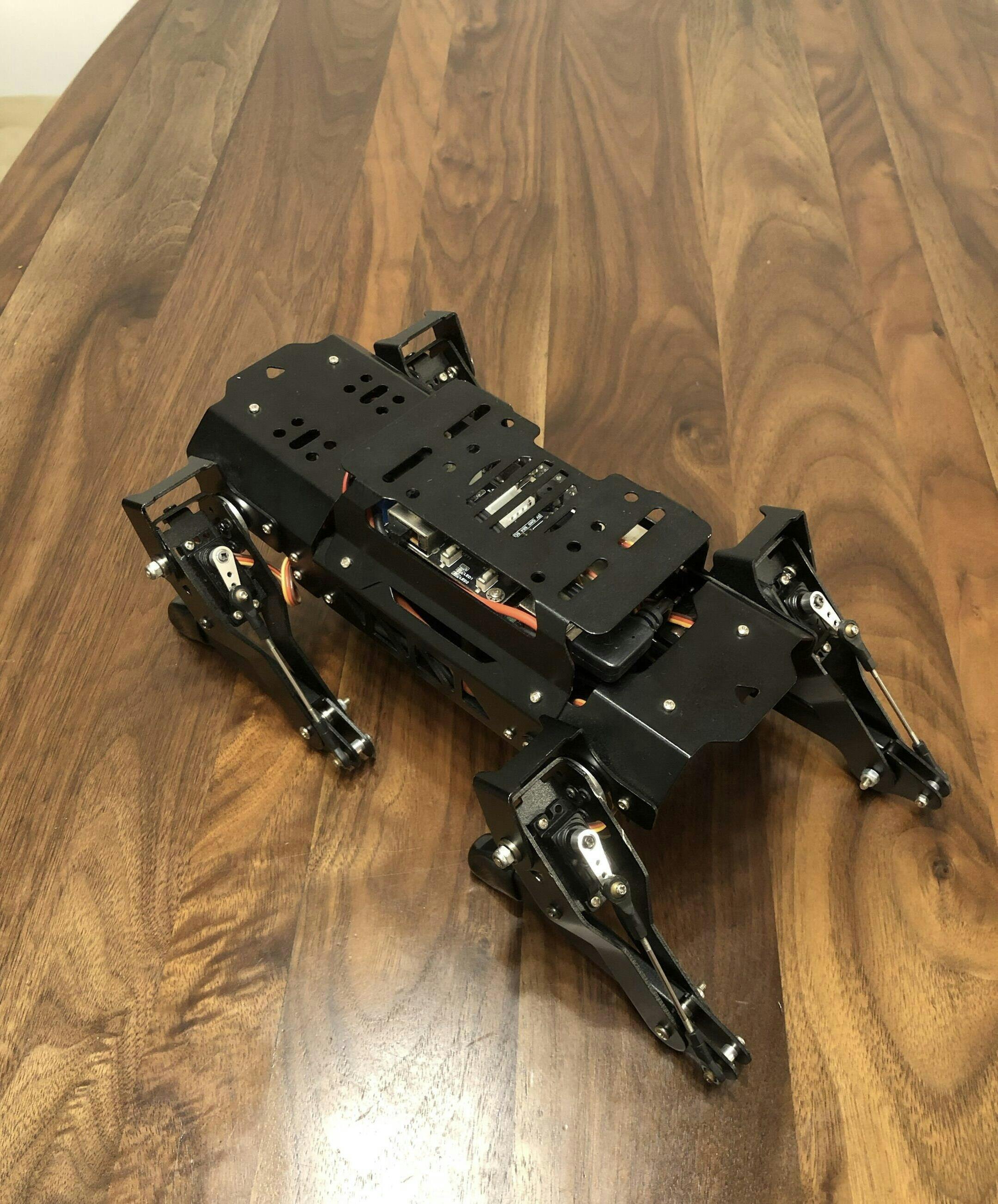
PuppyPi Hiwonder Quadruped Robot with AI Vision Powered by Raspberry Pi ROS1 ROS2 Open Source Robot Dog


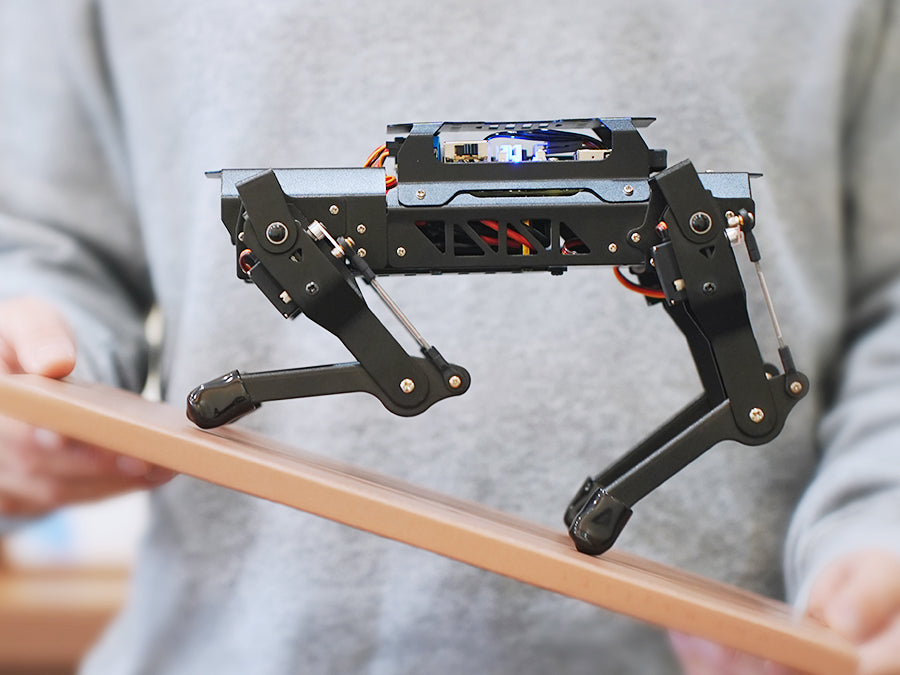
- 【Driven by Raspberry Pi and Coreless Servos】PuppyPi is an AI vision quadruped robot driven by Raspberry Pi 4B/5 and built on the Robot Operating System (ROS). It is equipped with 8 stainless steel coreless servos, delivering high-precision performance, rapid rotation speed, and a robust torque of 8KG.cm. With an IMU sensor, PuppyPi can detect its posture in real-time, enabling self-balancing capabilities.
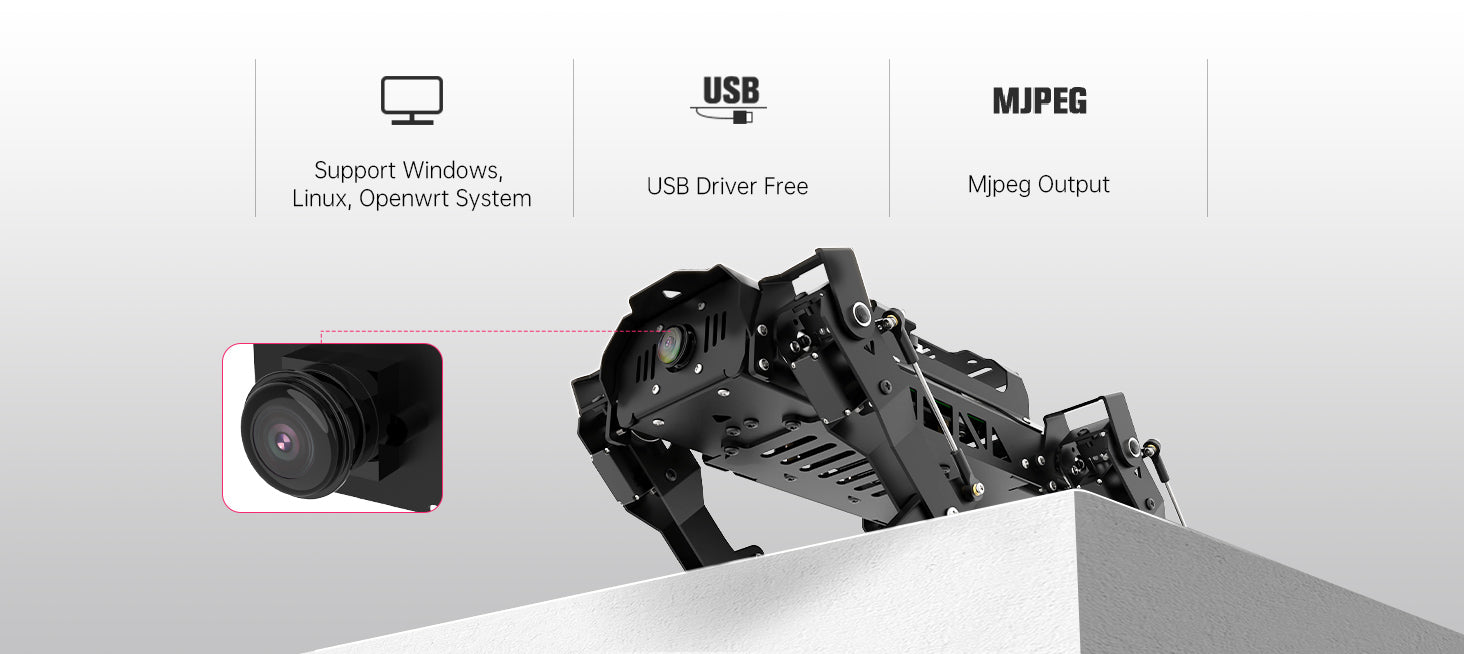
- 【AI Vision, Unlimited Creativity】PuppyPi is equipped with an HD wide-angle camera boasting 100W-pixel resolution. It utilizes OpenCV library for efficient image processing, enabling a diverse range of AI applications, including target recognition and localization, line following, obstacle avoidance, face detection, ball shooting, color tracking and tag recognition.
- 【Various Control Methods and FPV Live Camera Feed】You can conveniently control PuppyPi through WonderPi app available for Android and iOS devices, PC software, or a wireless PS2 handle. Additionally, PuppyPi Pro provides a first-person perspective experience by transmitting the live camera feed to the app.
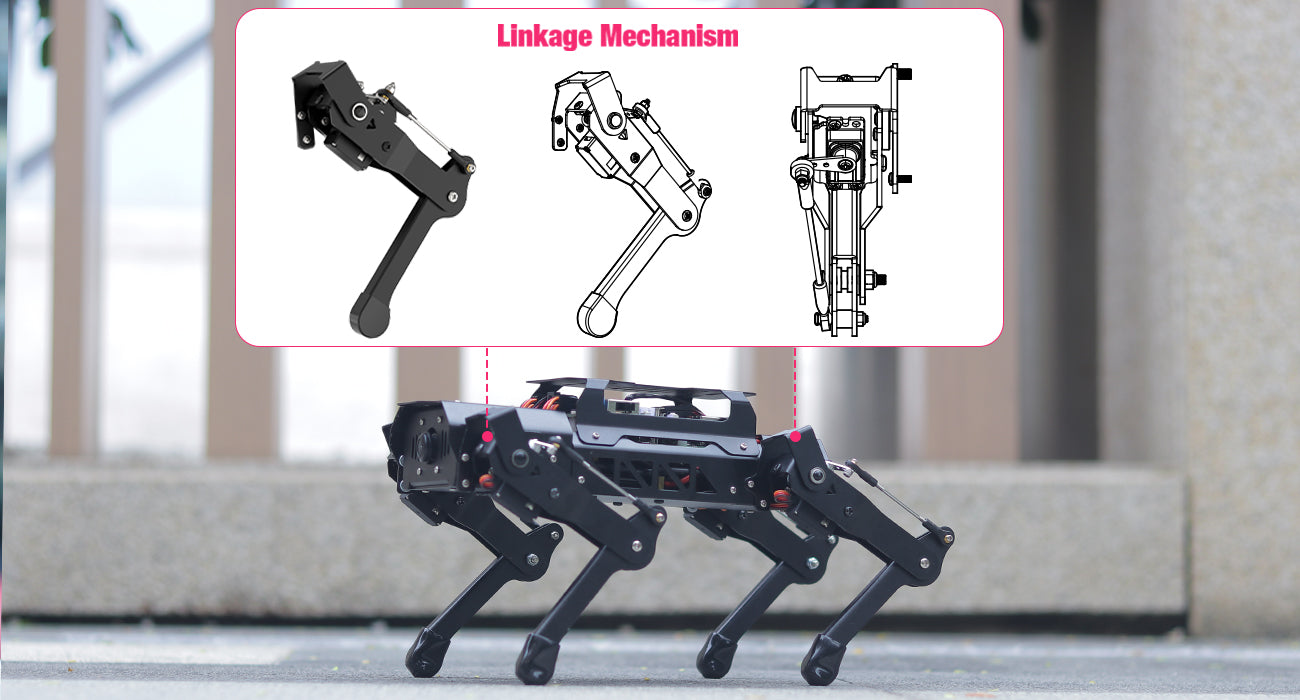
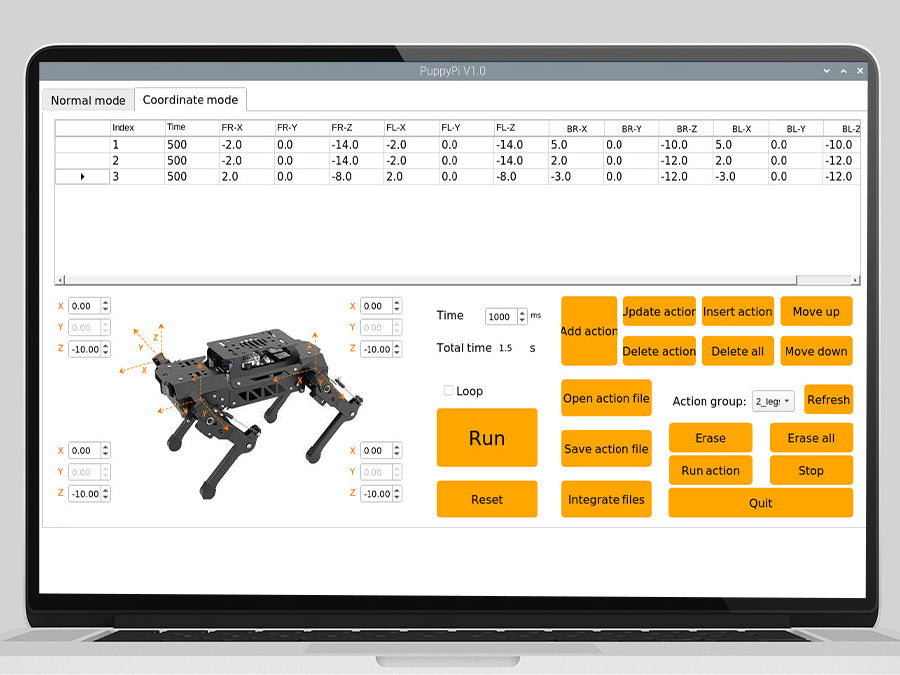
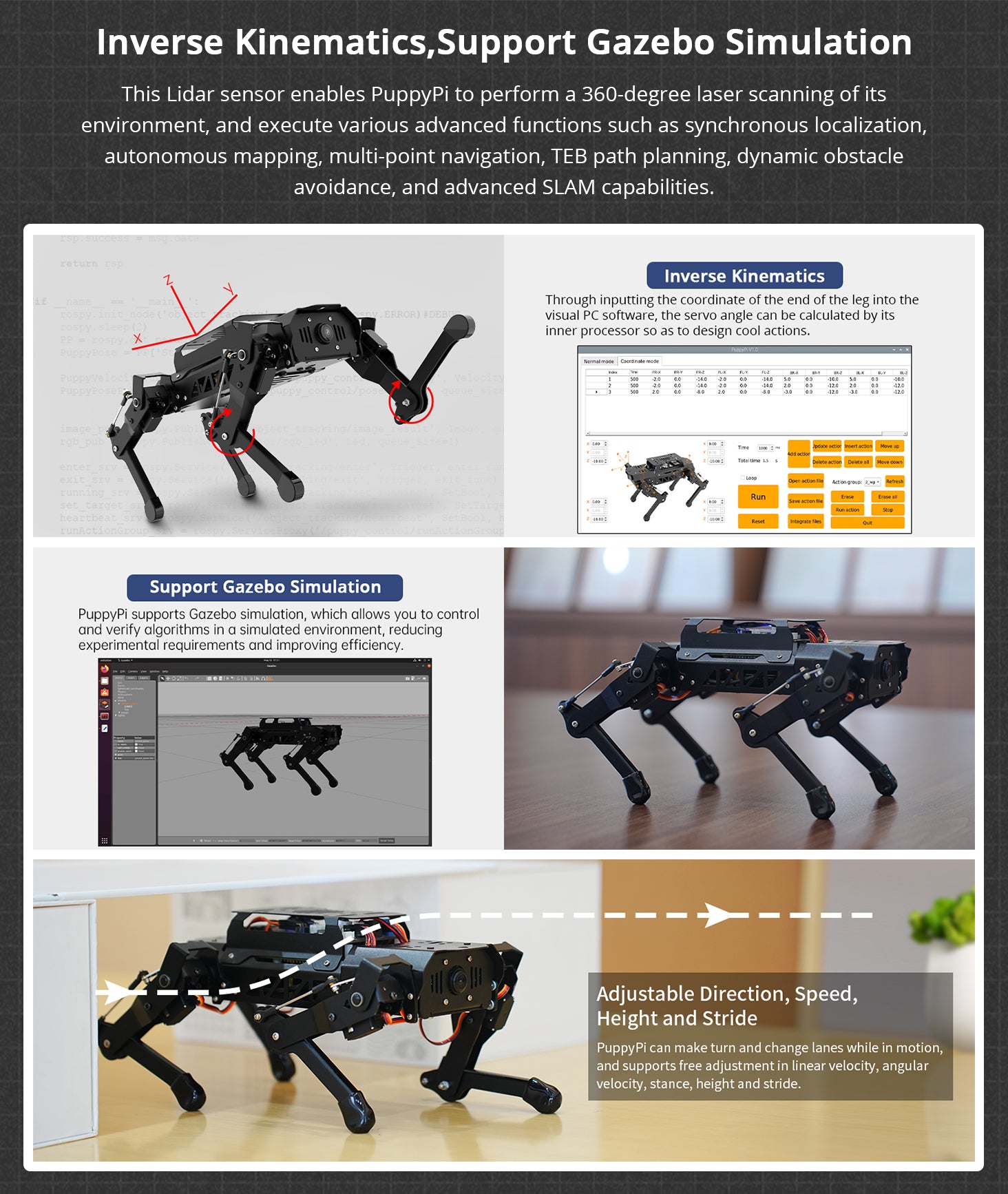
- 【Gait Planning, Free Adjustment】PuppyPi incorporates inverse kinematics algorithm offering precise control over the touch time, lift time, and lifted height of each leg. You can easily adjust these parameters to achieve different gaits, including ripple and trot. Additionally, PuppyPi Pro provides detailed analysis of inverse kinematics, along with the source code for the inverse kinematics function.
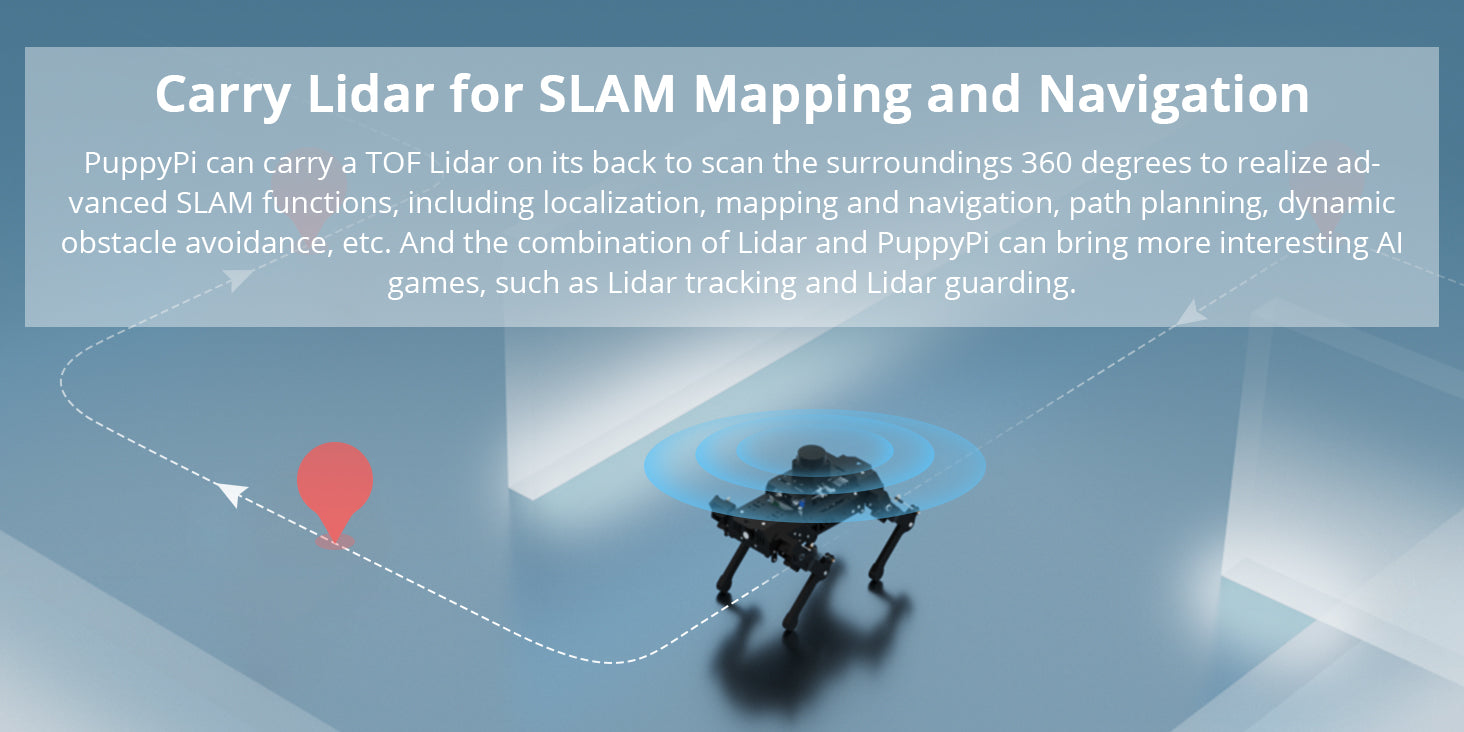
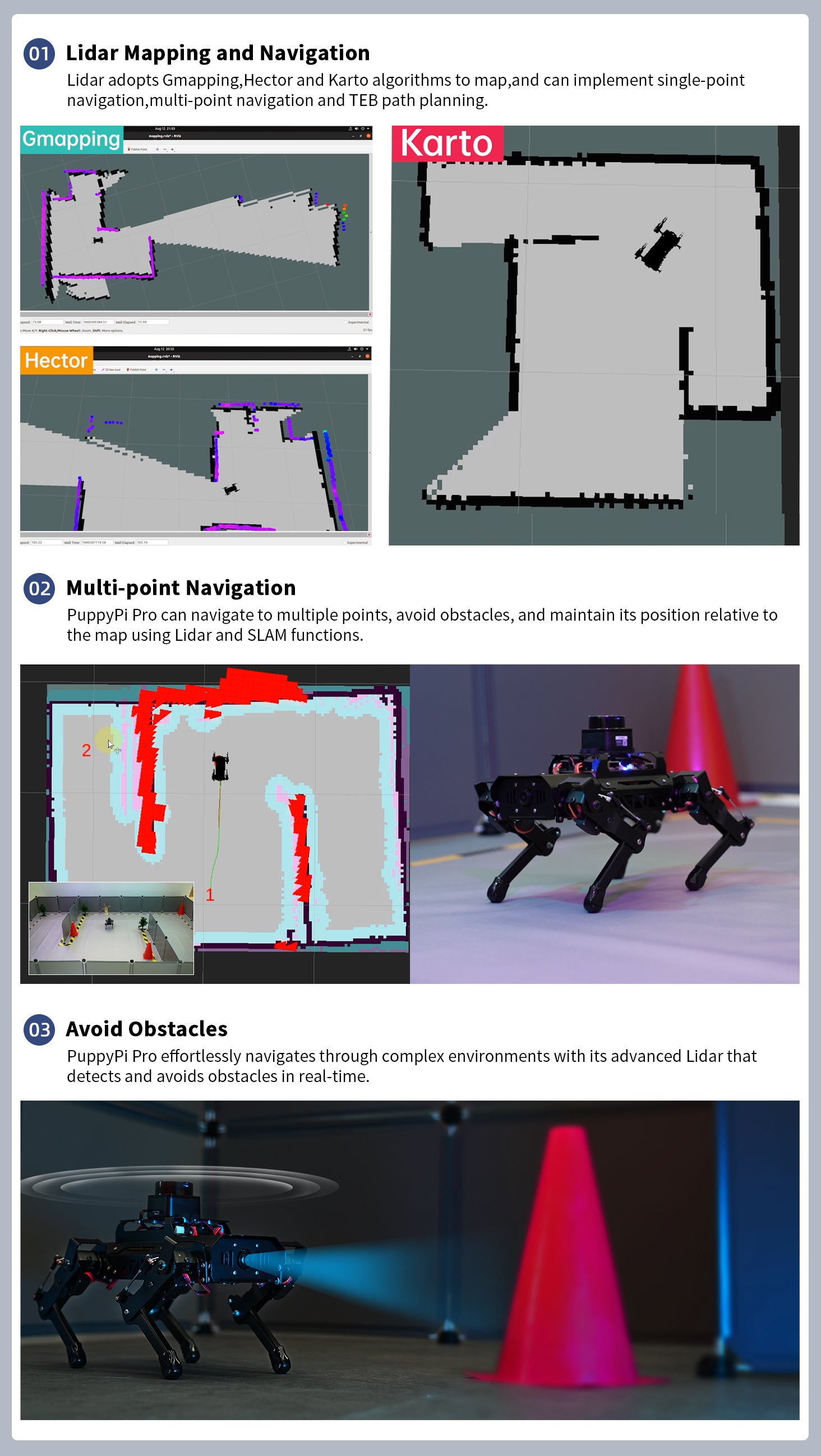
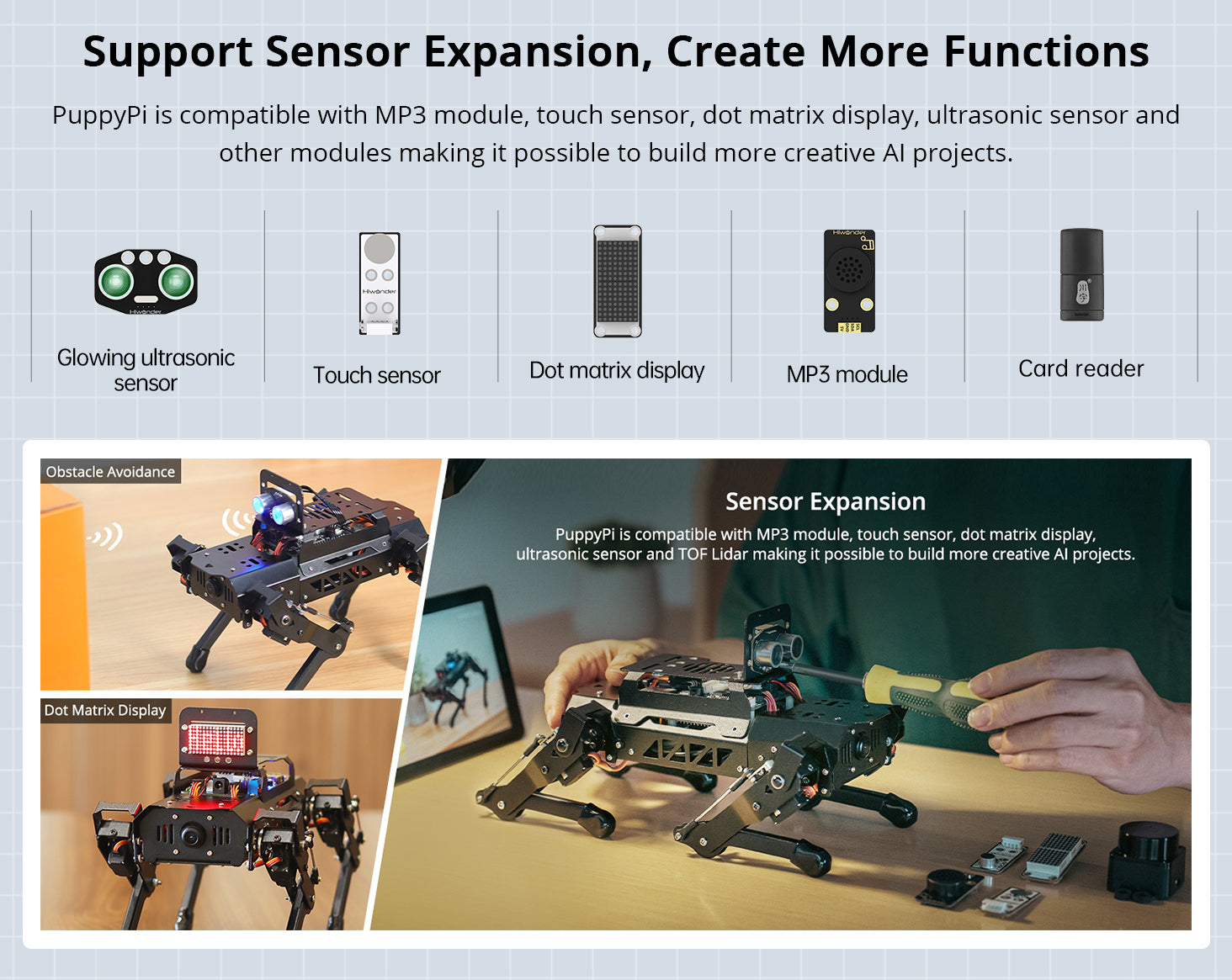
- 【Lidar and Robot Arm Expansion】PuppyPi Pro supports TOF Lidar and robot arm expansion, enabling 360° environment scanning, SLAM navigation, and dynamic obstacle avoidance. With visual sensing, it can precisely grasp and transport small objects, offering ample opportunities for creative expansion.








Lidar Functions
PuppyPi Pro is equipped with a mini TOF lidar.
Lidar Functions
PuppyPi Pro is equipped with a mini TOF lidar.




Using the graphical PC software, users can customize the robot arm's actions.
Users can control the robot and its arm through the APP to complete gripping and transport tasks.
With Al vision, the robot detects the target's location. By integrating inverse kinematics, the robot arm can autonomously recognize and grip the object.
Using AI vision, PuppyPi Pro detects and navigates around obstacles while following a line.
With a TOF Lidar, PuppyPi Pro uses SLAM technology to transport objects to designated locations. It then uses Al vision to locate the target area for placement.







High-rate Lipo Battery
Adopt 7.4V 2200mAh 20C built-in high-rate Lipo battery extending PuppyPi's working time to 60 minutes.
Aluminium Alloy Body
Aluminium alloy structure contributes to outstanding fall-resistance, anti-collision, inner protection, rigidity and load capacity!

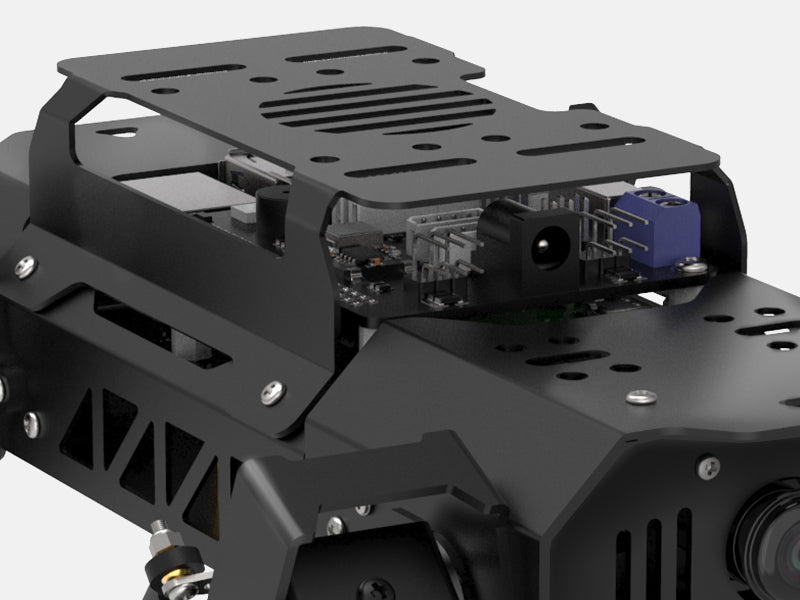
Voltage Display Module
Voltage display module can display the current battery level of PuppyPi letting you charge in time!




| Size: | 226*149*190mm |
| Weight: | 720g |
| Material: | Aluminium alloy |
| Resolution: | 480P |
| DOF: | 8DOF |
| Power: | 7.4V 2200mAh Lipo battery |
| Hardware: | Raspberry Pi 4B/5 and Raspberry Pi expansion board |
| Software | PC software, iOS/ Android APP |
| Servo | HPS-0618SG coreless servo |
| Control method | PC, APP and wireless handle control |
| Package size: | 32*32*17cm |
| Package weight: | About 1.5kg |







| Item | Specification |
| Size: | 226*149*190mm |
| Weight: | 720g |
| Material: | Aluminium alloy |
| Resolution: | 480P |
| DOF: | 8DOF |
| Power: | 7.4V 2200mAh Lipo battery |
| Hardware: | Raspberry Pi 4B/5 and Raspberry Pi expansion board |
| Software | PC software, iOS/ Android APP |
| Servo | HPS-0618SG coreless servo |
| Control method | PC, APP and wireless handle control |
| Package size: | 32*32*17cm |
| Package weight: | About 1.5kg |
Customer Reviews
I've been looking for a walking robot based on ROS that I could learn from and this HiWonder RaspberryPi ROS robot is the perfect platform. I highly recommend it to anyone wanting to learn ROS and have an excellent high quality hardware and software platform. I like inventing in education to make myself better and I love to experiment with robots. This one covers all the high end robotics hardware and software us civilians can have. I think universities should use this platform to teach ROS, Python and Robotics in general. Is so well thought of in every way. I give it an 11/10 stars! I am very impressed. Works out of the box if you don't want or care about programming just remote control it with your phone or a PS2 style controllers- works beautifully!
I bought this robot for our after-school Robotics Club. The students are really excited about it! It has some simple pre-programmed commands that allow you to immediately interact with it, straight out of the box. Then, some more challenging tasks to undertake that will keep students interested. A great purchase!


We received our PuppyPi about 2 weeks ago. The packaging was solid and the robot was in excellent condition. By following the instructions and reading carefully, we were able to perform the out-of-the-box functionality in a matter of minutes. We connected the PuppyPI to the house Wi-Fi and used both our phones and the hand controller with very few issues. We played with the action groups and made the dog do many silly things. It was a blast!!
HOWEVER, we are now trying to understand the development environment and how to backup and deploy the software. I have coded in many languages over many years, although Python is not my best language. I am more of a Windows person and my son is more of an Linux person. We are learning the Robot Operating System and how Docker is being used on the Raspberry Pi. There is a HUGE amount of general documentation on Python, Linux, ROS and the peripherals. (Camera, Lidar, etc.) There is not much documentation on how the environment is installed on the Raspberry PI and how to set up an external development environment to dest before deploying code to the Raspberry Pi. I am hoping to find a user community to help us over some of our hurdles and so we don't misrepresent anyof the issues we are facing. We will be posting some videos on YouTube of the Out-of-the-Box functions and basic actions. The we will post our development efforts and challenges. I hope this spurs interest in this product. It is worth every penny. It is an excellent entry into programming robotics. The environment is a little outdated and we may have issues with version compatibility. Still, it was an excellent purchase and is a good challenge.
Thank you so much for your support and review! Super appreciate that! Please share the details of the environment compatibility so that we can check for you :D
I've been looking for a walking robot based on ROS that I could learn from and this HiWonder RaspberryPi ROS robot is the perfect platform. I highly recommend it to anyone wanting to learn ROS and have an excellent high quality platform. I like inventing in education to make myself better and I love to experiment with robots. This one covers all the high end robotics you could think of. I give it an 11/10 stars! I am very impressed. Works out of the box if you don't want or care about programming just remote control it with your phone or a PS2 style controllers- works beautifully! Totally worth its weight in gold! I got mine from Amazon, but you can also order from their website. Links below to buy and the resources to download documentation, code, sample experiments (they are excellent and super fun!). Best investment I made this year! Lots of ROS jobs out there too.
I did a first reaction video and plan to do a lot more videos reviewing all of the tools and software games-experiments! So excited!
https://youtu.be/0d-zngElX9o

Thanks to the great work of the support team, very professional with my issue. Everything is working fine now.
Its design and manufacturing quality are excellent, its body is solid and durable, and its details are also very good.
Questions & Answers
Have a Question?
-
lost some screws to attach lidar hat. How/where do I purchase additional screws?
Hello! Please contact us at support@hiwonder.com
-
What is the age range for this?
It is suitable for high school and university students
-
i need a short summary for a PuppyPi Quadruped robot (shown on the very first page of the slide) about: 1. The total number of joints used and their specific location 2. The types of motions and joints used 3. The degree of freedom for each joint 4. robot configuration and work envelop 5. Joint notation 6. robot end effectors 7. type of mechanical grippers 8, Special tools * Include also the feature that if the robot stumbles upon something and falls, it should be able to get back up by its own.
Hello. Here are the answers you requested:
1. The robot features 8 degrees of freedom (DOF), with each leg equipped with 2 servos. The robot arm has 2 DOF.
2. The robot supports three gaits: Walk, Amble, and Trot.
3. The PuppyPi Pro Ultimate Kit is equipped with a TOF LiDAR, Raspberry Pi control system, HD wide-angle camera, coreless servos, and a LiPo battery.
4. The remote control range is the same as the WiFi coverage range.
5. For details on the joint notation, please refer to this file: https://drive.google.com/drive/folders/1ox32-taovYwqaI9O2-BXG5zkDzr_eg19?usp=sharing
6. The end effector of the PuppyPi Pro Ultimate Kit is a gripper.
7. The robot has a self-balancing function.
-
I need a short summary for a PuppyPi Quadruped robot (shown on the very first page of the slide) about: 1. The total number of joints used and their specific location 2. The types of motions and joints used 3. The degree of freedom for each joint 4. robot configuration and work envelop 5. Joint notation 6. robot end effectors 7. type of mechanical grippers 8, Special tools * Include also the feature that if the robot stumbles upon something and falls, it should be able to get back up by its own.
Hello, here are the answers you requested:
1. The robot features 8 degrees of freedom (DOF), with each leg equipped with 2 servos. The robot arm has 2 DOF.
2. The robot supports three gaits: Walk, Amble, and Trot.
3. The PuppyPi Pro Ultimate Kit is equipped with a TOF LiDAR, Raspberry Pi control system, HD wide-angle camera, coreless servos, and a LiPo battery.
4. The remote control range is the same as the WiFi coverage range.
5. For details on the joint notation, please refer to this file: https://drive.google.com/drive/folders/1ox32-taovYwqaI9O2-BXG5zkDzr_eg19?usp=sharing
6. The end effector of the PuppyPi Pro Ultimate Kit is a gripper.
7. The robot has a self-balancing function.
-
So I want to, add some programs to the PuppyPi pro, but I dont know if there is a module on Python for puppypi. Please let me know if there is one!
Hi there, sure! Pls refer to this link: https://www.hiwonder.com.cn/store/learn/99.html
-
hi, I purchased one of these via Amazon. I bought the standard kit. I want to get the controller that comes with the advanced kit but I am unsure if the controller on this site is compatible? How do I order just the controller and not the entire robot advanced kit?
Sorry, we don't sell Raspberry Pi separately. Hope you can understand:)
-
What OS and IDE are required for Python programming?
OS: Raspberry Pi system
IDE: the IDE used by PuppyPi is not fixed. It adopts python3.7.3. For vscode and pycharm, you can choose the desrired one. -
My puppy pi keeps falling over when walking. I am using the mobile app and when going any speed it falls over. I have the Tof lidar module on top. How can I stop it?
Please kindly send us a video showing the robot's perfomance to support @hiwonder.com
-
What's the maximum payload of PuppyPi ? Can I combine it with the HiWonders ArmPi mini? Thanks
Sorry, but we don't have specific payload data for PuppyPi. It seems that PuppyPi may not be compatible with the ArmPi mini, as there are no holes to secure the ArmPi mini onto PuppyPi
















