










IMU Inertial Navigation Module ROS1/ROS2 Robot MEMS USB Magnetometer 10-axis ARHS Posture Sensor


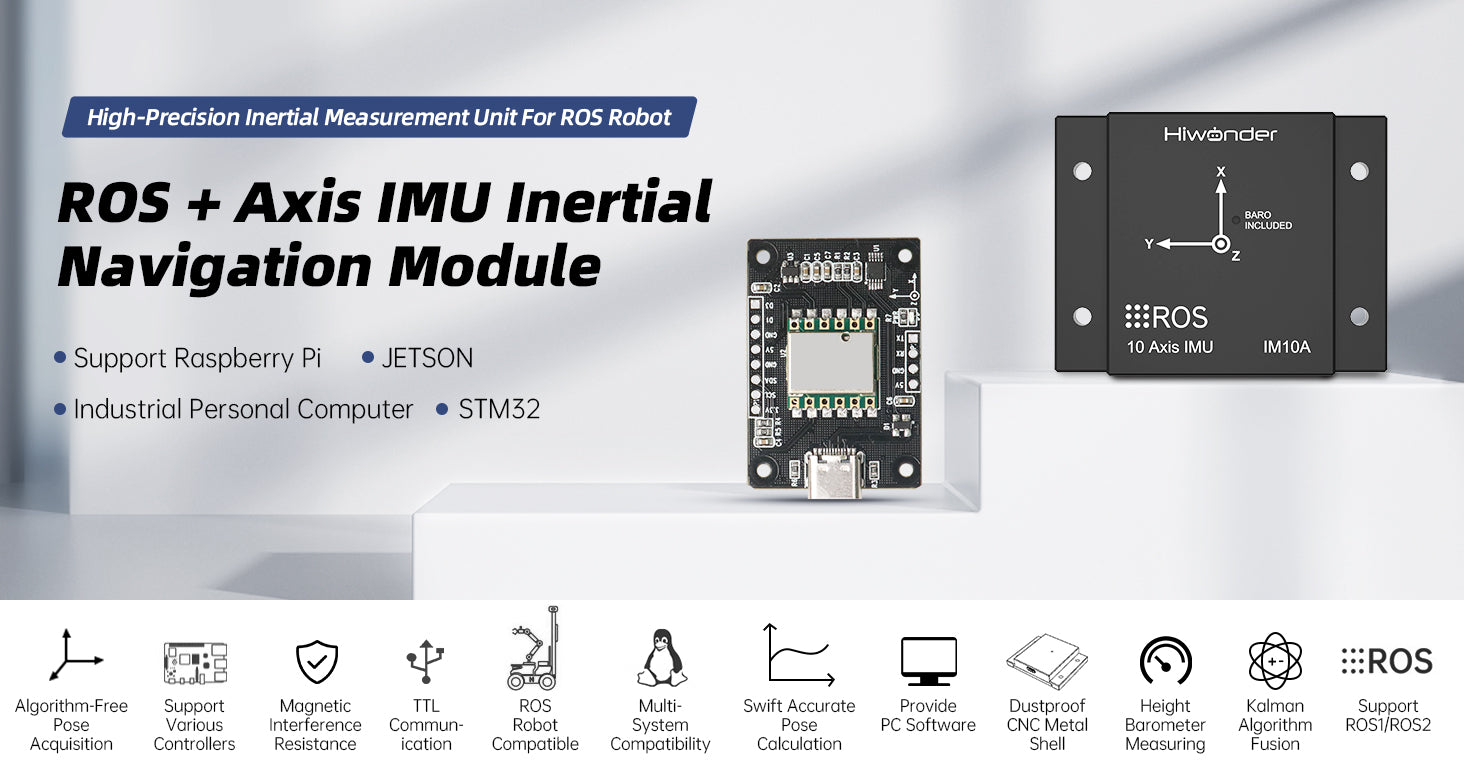
- 【High-performance three-dimensional motion and posture measurement system】The IM10A inertial navigation module includes a 3-axis electronic gyroscope + 3-axis accelerometer + 3-axis magnetometer + barometer (angle + altitude), combined with a high-dynamic Kalman filter fusion algorithm to provide users with high-precision, high-dynamic, real-time compensation 3-axis posture angle data.
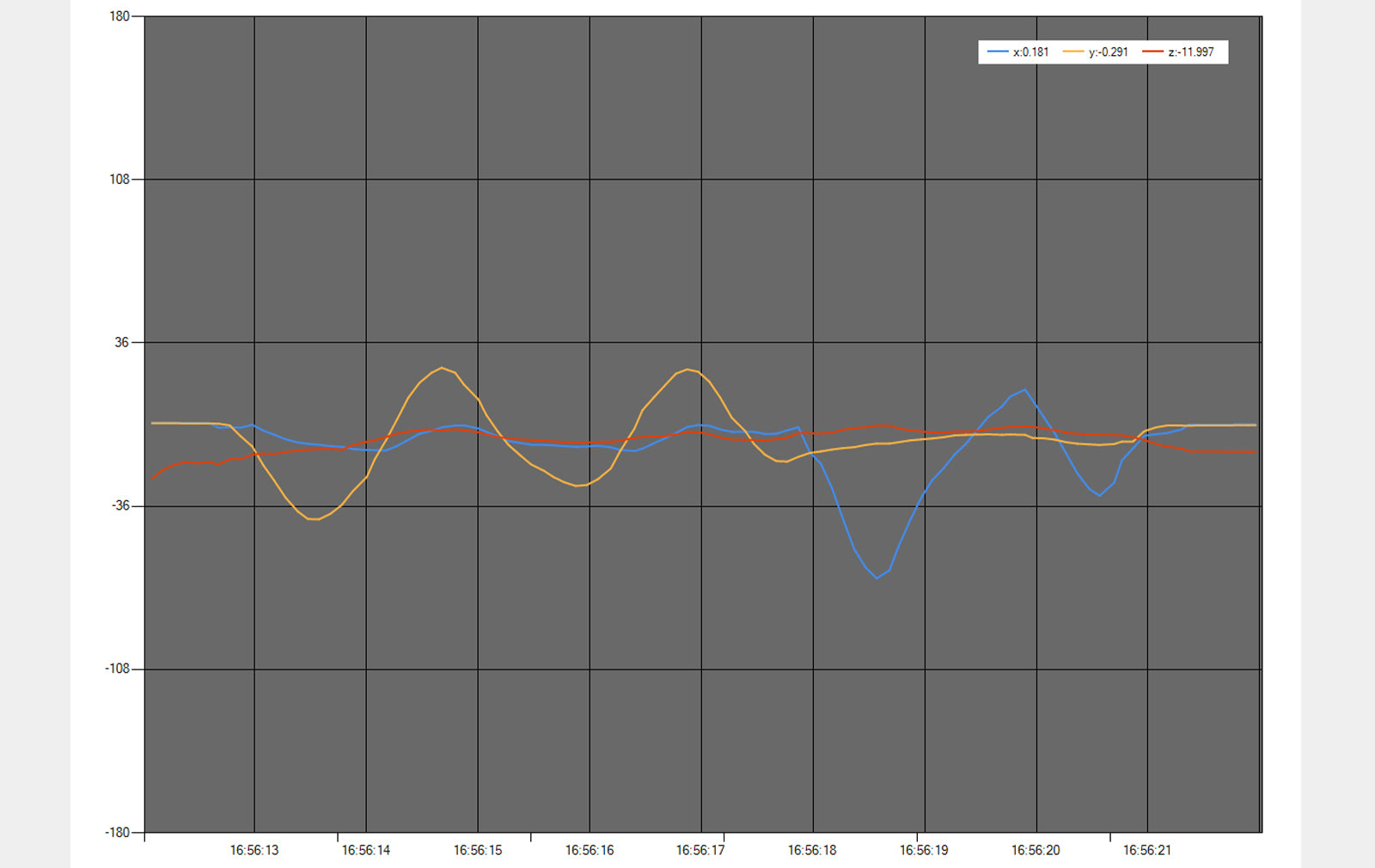
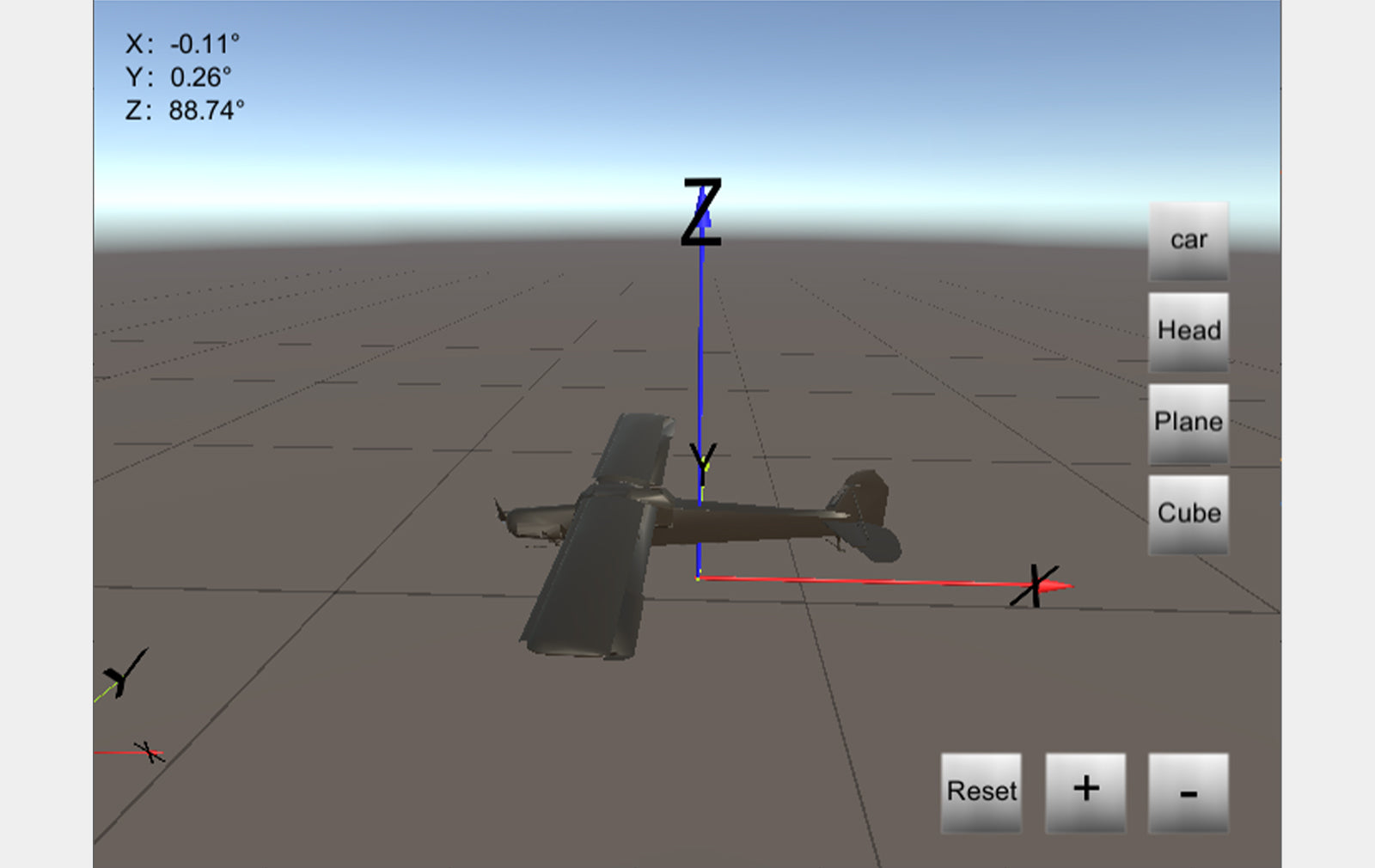
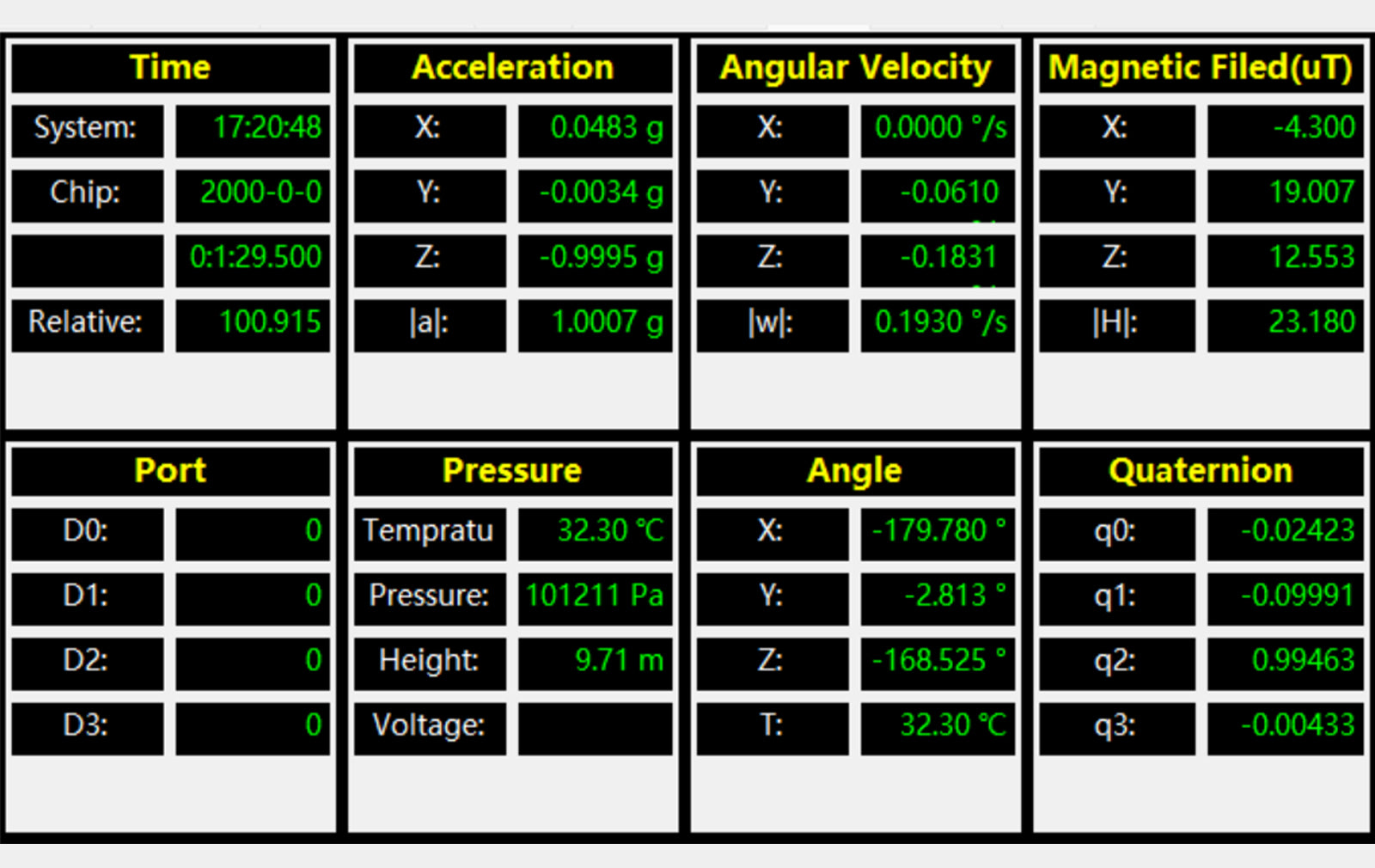
- 【Rich data output】The IM10A inertial navigation module can output Euler angles (Roll, Pitch, Yaw), quaternions, position, speed, acceleration, angular velocity, and magnetic field vectors. It can provide output frequency up to 200Hz in real time, thus greatly reducing the research and development time for various needs.
- 【Supports multiple communication methods】 Supports USB/UART/I2C communication methods, is more efficient and compatible with Raspberry Pi, STM32, and Jetson series development boards, providing more development possibilities for DIY makers.
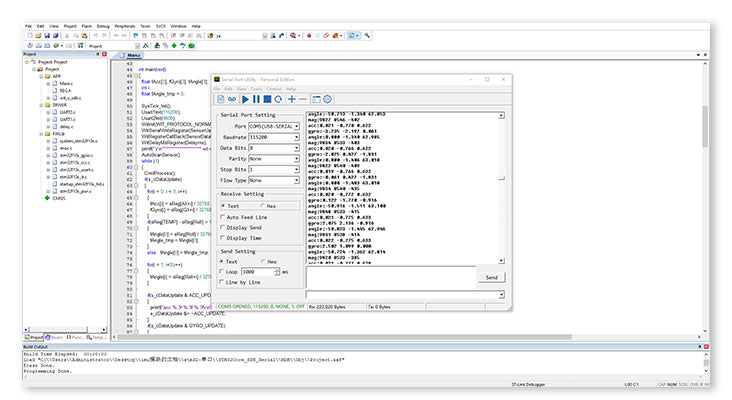
- 【Provide rich tutorial materials】 Hiwonder provides a wealth of tutorial materials, such as PC software, operating instructions, development manuals, development codes, source codes, etc.

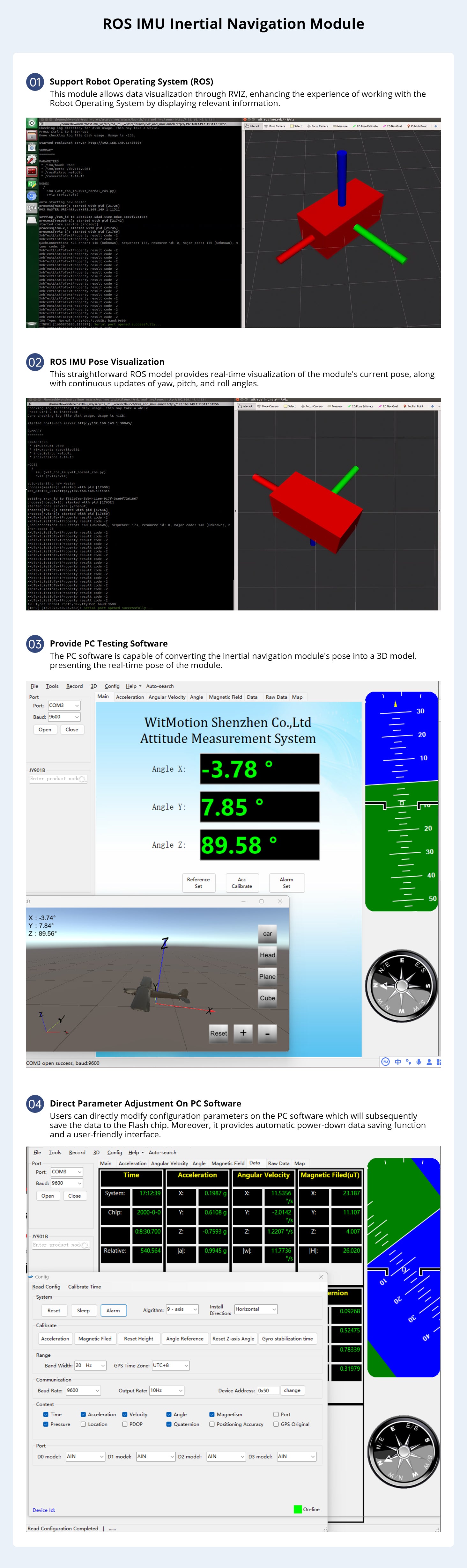
Support ROS1 and ROS2 Systems
The IM10A module supports ROS1 and ROS2 systems, and the data output frequency is up to 200Hz. We provide dual system function packages and usage tutorials to facilitate users to get started quickly.
10-axis Posture Sensor
The IM10A inertial navigation module has built-in three-axis gyroscope, three-axis accelerometer, three-axis magnetometer and barometer.

Built-in Barometer for Altitude Measurement
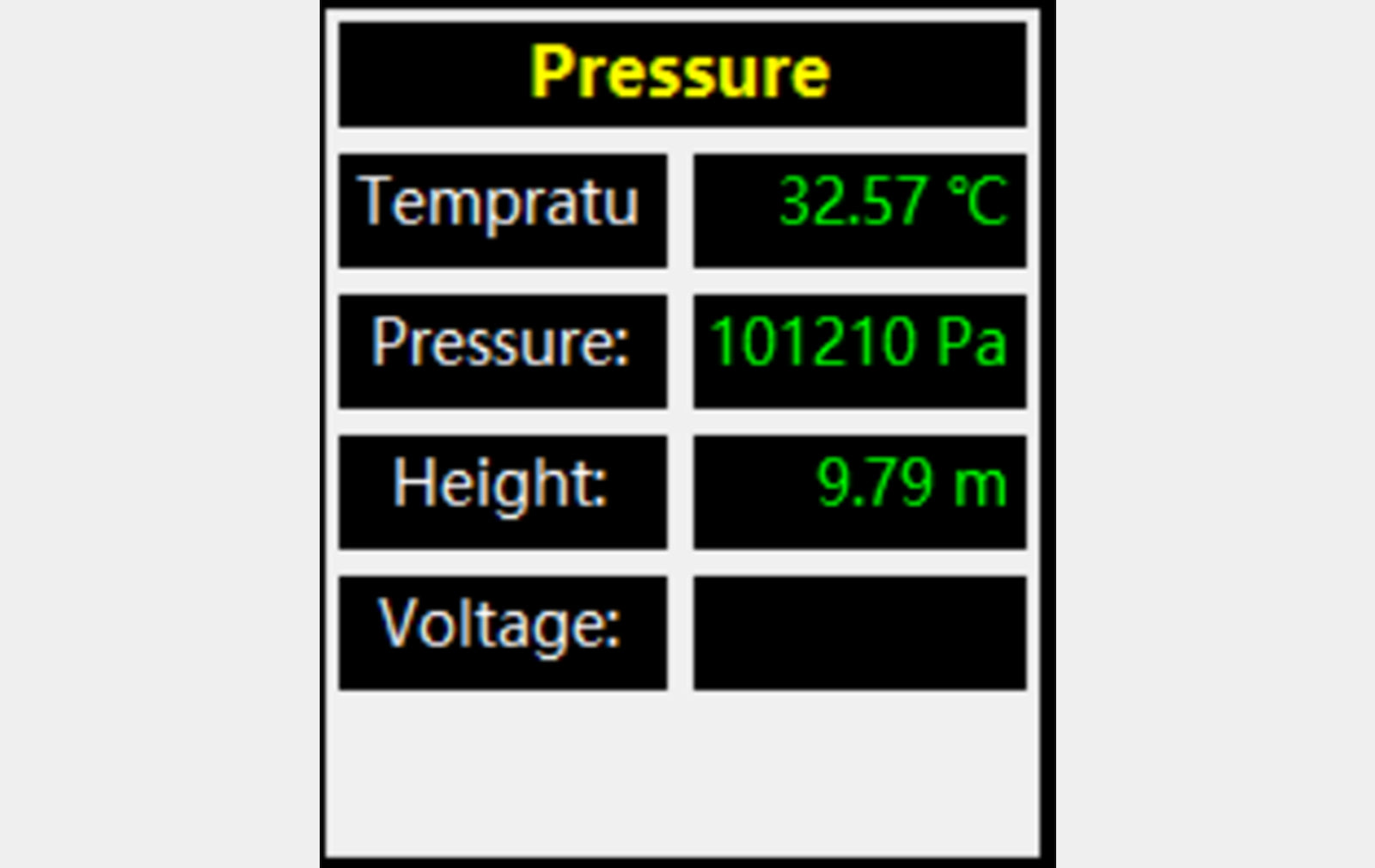
The IM10A module has a built-in barometer, which can measure the current altitude, and can also integrate and calculate navigation data to output air pressure data.
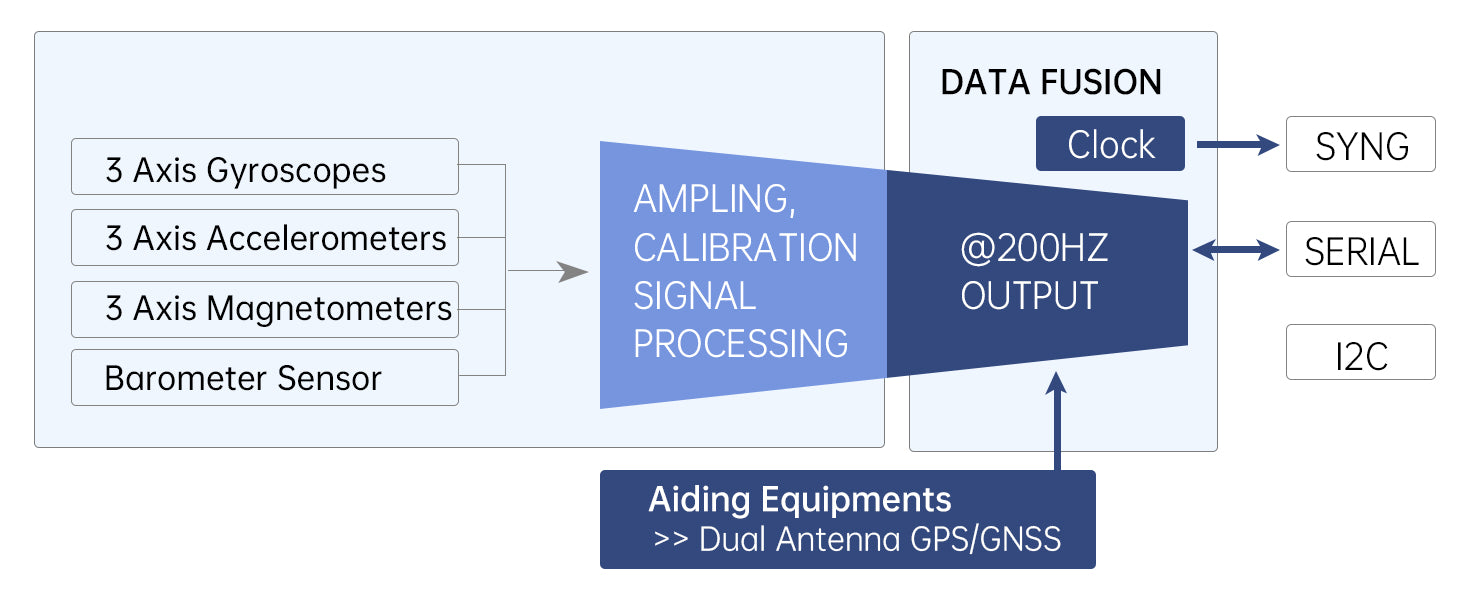

Rich Data Output
The sensor raw data output frequency is 200Hz: three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer data. Fusion-calculated navigation data output frequency 200Hz: Euler angles, quaternions, air pressure, position (combined with GNSS), speed.
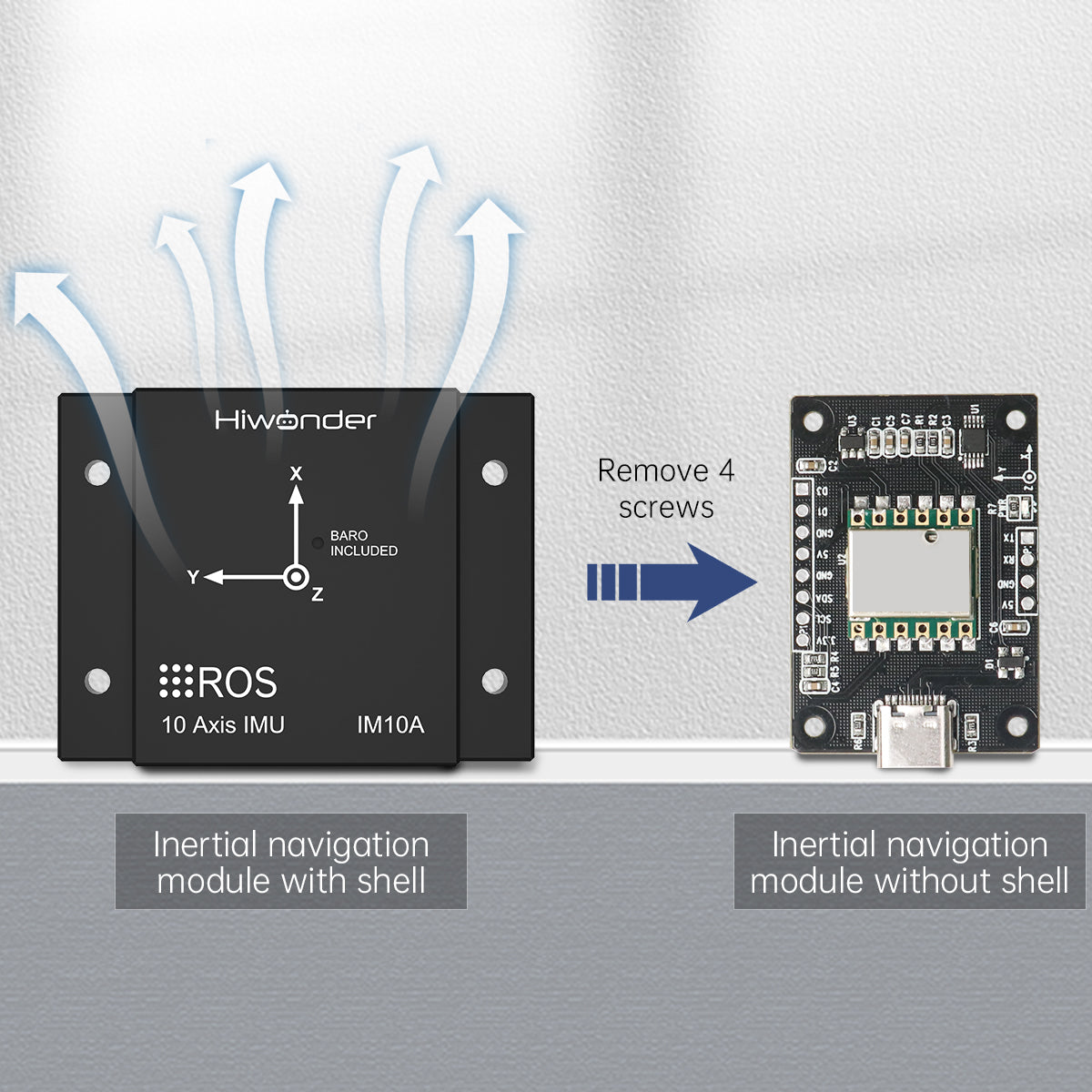
Removable High-precision CNC
Metal Shell
The high-precision CNC metal shell ensures good heat dissipation performance and long period of stable operation.The metal shell can be easily disassembled, enabling communication through TTL/I2C pins.
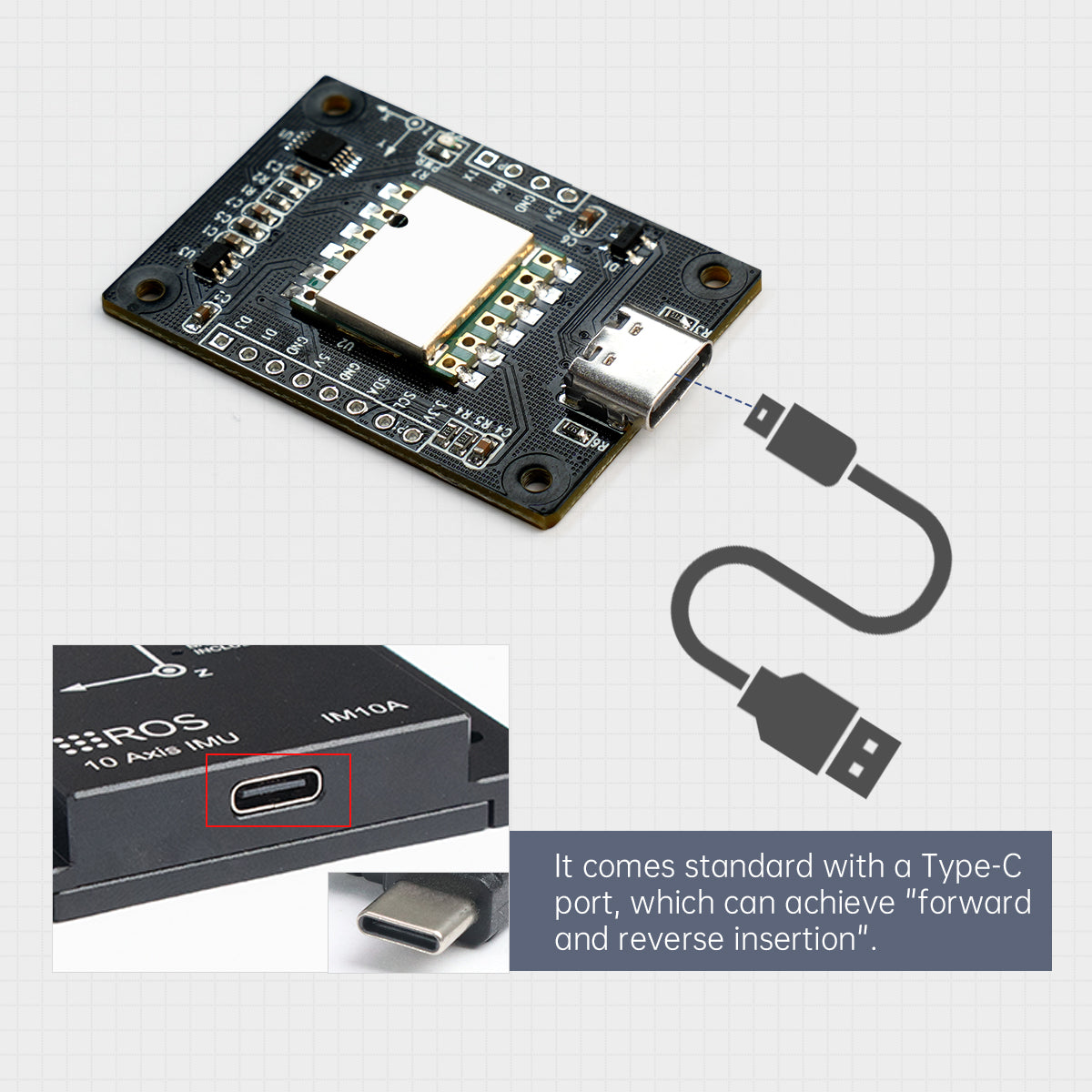
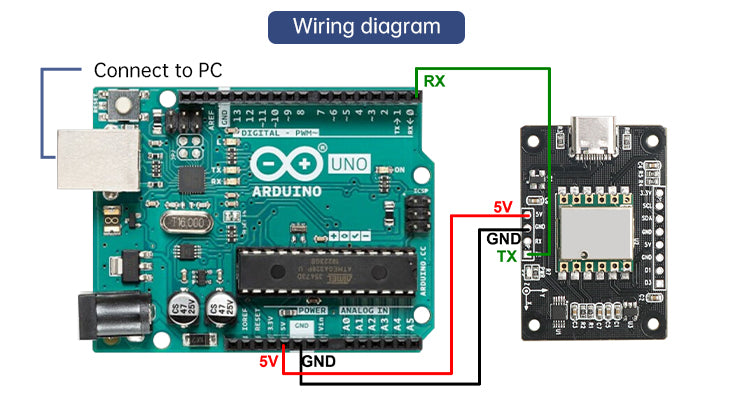
Support Multiple Communication Methods
The IM10A module supports multiple communication methods such as USB, UART, and I2C, and is equipped with a standard TypeC port.
Features
- ①Stable angle output, yaw angle: 0.5″RMS, posture: 0.1*RMS
- ②Gyroscope automatic calibration technology
- ③Gyroscope bias, acceleration calibration, magnetometer calibration
- ④Integrated posture solver
- ⑤Serial port TTL, I2C communication port
- ⑥360° Stable and continuous angle output
- ⑦Built-in barometer for altitude measurement
- ⑧Receive serial GPS data in accordance with the NMEA-0183 standard to establish a GPS-IMU navigation integration unit
| Parameter | Note | Parameter | Note |
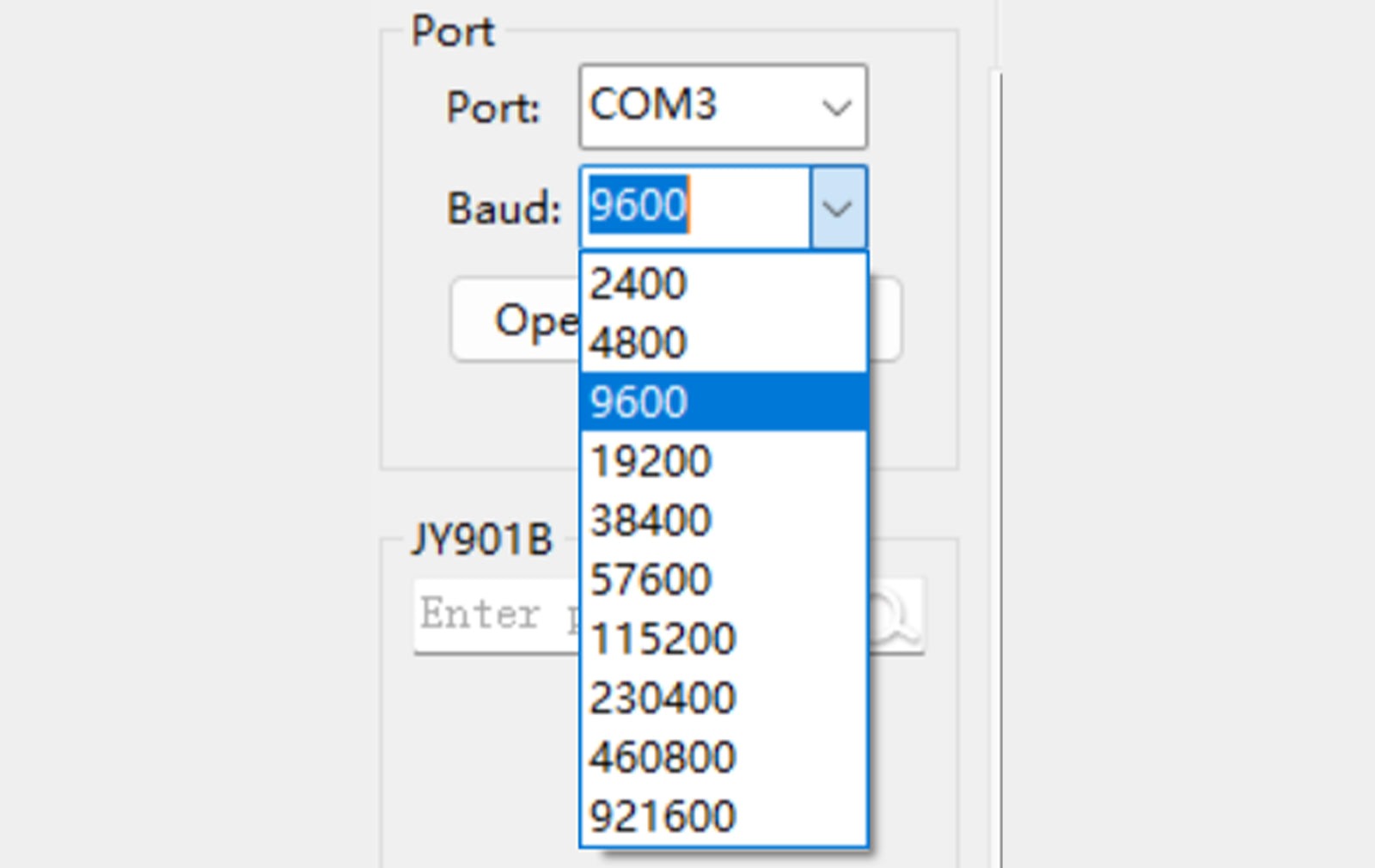
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. | Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit | I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Output speed | 10Hz by default. It can set to 0.2-200Hz | Working voltage | 5V or 3.3V |
| Operating temperature | -40-85℃ | Working current | 12mA |
| Storage temperature | -40-100℃ | Start-up duration | 1000ms |
| Shock resistance | 20kg | Support | ROS1/ ROS2 |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more | PC software compatible system | Windows |
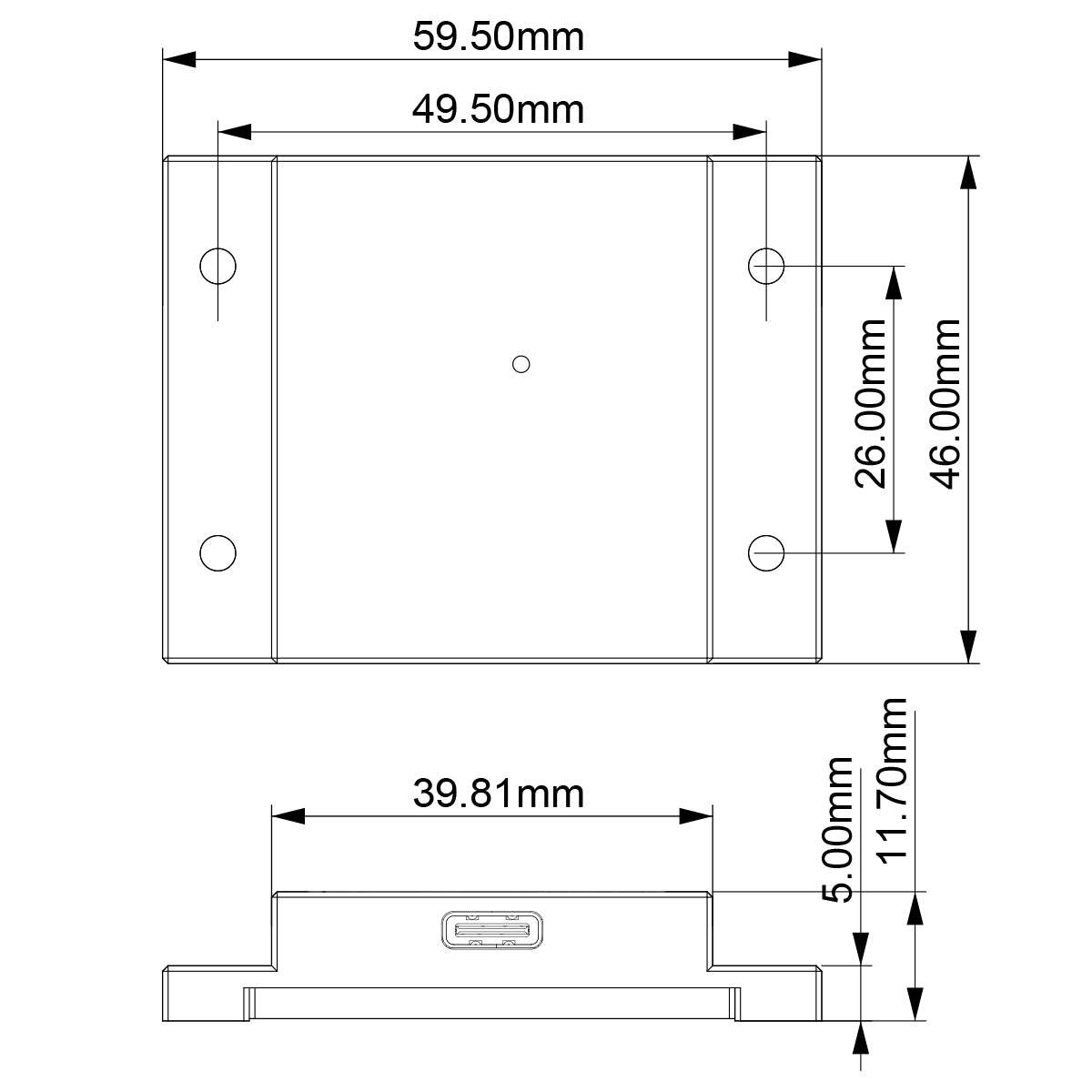
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm | Weight | Without shell: 5.7g; With shell: 50g |
| Parameter | Note |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. |
| Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit |
| I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Output speed | 10Hz by default. It can set to 0.2-200Hz |
| Working voltage | 5V or 3.3V |
| Operating temperature | -40-85℃ |
| Working current | 12mA |
| Storage temperature | -40-100℃ |
| Start-up duration | 1000ms |
| Shock resistance | 20kg |
| Support | ROS1/ ROS2 |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more |
| PC software compatible system | Windows |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm |
| Weight | Without shell: 5.7g; With shell: 50g |
| Parameter | Condition | Classic value |
| Range | - | ±16g |
| Resolution | ±16g | 0.0005(g/LSB) |
| RMS noise | bandwidth=100Hz | 0.75-1mg-rms |
| Zero drift | Placed horizontally | ±20-40mg |
| Temperature drift | -40~+85℃ | ±0.15mg/℃ |
| Bandwidth | - | 5-256Hz |
| Parameter | Condition | Classic value |
| Range | - | ±2000°/s |
| Resolution | ±2000°/s | 0.061(°/s)/(LSB) |
| RMS noise | bandwidth=100Hz | 0.028-0.07(°/s)-rms |
| Zero drift | Placed horizontally | ±0.5-1°/s |
| Temperature drift | -40~+85℃ | ±0.005~0.015(°/s)/℃ |
| Bandwidth | - | 5-256Hz |
| Parameter | Condition | Classic value |
| Range | - | ±2Gauss |
| Resolution | ±2Gauss | 0.0667mGauss/LSB |
| Parameter | Condition | Classic value |
| Range | - | 300-1100hPa |
| RMS noise | Standard mode | 0.5Pa-RMS |
| Relative accuracy | - | ±0.06hPa |
| Parameter | Condition | Classic value |
| Range | - | x: ±180°; y: ±90° |
| Tilt accuracy | Static | 0.1° |
| Tilt accuracy | Dynamic | 0.5° |
| Resolution | Placed horizontally | 0.0055° |
| Temperature drift | -40~+85℃ | ±0.5~1°/s |
| Parameter | Condition | Classic value |
| Range | - | Z: ±180° |
| Yaw accuracy | 9-axis algorithm, magnetic field calibration, dynamic/ static | 0.1° (free from magnetic interference) |
| Yaw accuracy | 6-axis algorithm, static | 0.5° (dynamic accumulation of integral errors) |
| Resolution | Placed horizontally | 0.0055° |


GPS&Beidou Positioning Module



| Item | Specification |
| Serial communication port | Default value: 9600bps. It can be adjusted within 4800bps - 921600bps. |
| External assistance | Connect GPS module to D1 port to generate inertia navigation unit |
| Output speed | 10Hz by default. It can set to 0.2-200Hz |
| Operating temperature | -40-85℃ |
| Storage temperature | -40-100℃ |
| Shock resistance | 20kg |
| Supporting device | PC, Raspberry Pi, NVIDIA Jetson series controllers, STM32 microcontroller and more |
| Size | Without shell: 42.2*29.6mm; With shell: 49.5*59.5*11.7mm |
| Output data | On-chip clock, 3-axis acceleration, 3-axis angular velocity, 3-axis magnetic field, 3-axis angle, quaternion, port status, pressure and height |
| I2C port | The hardware I2C supports a maximum of 400KHz, while the software I2C supports a maximum of 100KHz |
| Working voltage | 5V or 3.3V |
| Working current | 12mA |
| Start-up duration | 1000ms |
| Support | ROS1/ ROS2 |
| PC software compatible system | Windows |
| Weight | Without shell: 5.7g; With shell: 50g |
Questions & Answers
Have a Question?
-
Does it integrate to provide position and how accurate is it?
Hello,
If you are looking for a positioning module, I recommend checking out this one: https://www.hiwonder.com/products/gps-beidou
The IMU inertial navigation module, on the other hand, is primarily used for calculating the pose.
-
What is the accuracy of this device? I would like to know the following specifications: Gyro Bias in-run Stability (RMS) Gyro Noise (ARW) Accel Bias in-run Stability Pitch & Roll Accuracy Accel SF Accuracy (over temp. range) Please provide. Thanks
Hello,
You can find the parameters in section 1.6: https://drive.google.com/file/d/1MGJJ-1FF6zlBm9PsxHj_fXG8xvsZoLO0/view?usp=sharing
-
Where to find ros2 package
Please check this link: https://drive.google.com/drive/folders/1c3N2OIcD3K7WgKFwE5C96v4J3qYWh-qN?usp=sharing
-
where can I find the tutorials for this product?
Please check this link: https://drive.google.com/drive/folders/1c3N2OIcD3K7WgKFwE5C96v4J3qYWh-qN?usp=sharing
-
How can I use this IMU sensor in ROS2? Are there any packages that can be available in ROS2? If so, could you explain it to me? Thanks.
Check this link: https://drive.google.com/drive/folders/1c3N2OIcD3K7WgKFwE5C96v4J3qYWh-qN?usp=sharing
-
I want to buy this imu per my pi4 Ros2 Humble project; I need to be shure software (ROS2 HUMBLE package) is compatible/compilable and need to know publichet topic etcetc.. first to buy. How can I obtain ros2 package of this IMU to try to compile?
Check this link: https://drive.google.com/drive/folders/1c3N2OIcD3K7WgKFwE5C96v4J3qYWh-qN?usp=sharing
-
Is there a link to the ROS2 topic repository or some wiki?
Pls check this link: https://drive.google.com/drive/folders/1c3N2OIcD3K7WgKFwE5C96v4J3qYWh-qN?usp=sharing
Related items
 with Precision Depth Camera & LiDAR for Robot Programming")
 with Precision Depth Camera & LiDAR for Robot Programming")
















")
")